Tutoriel d'apprentissage par transfert PyTorch avec exemples
Qu'est-ce que l'apprentissage par transfert ?
Transfert d'apprentissage est une technique consistant à utiliser un modèle entraîné pour résoudre une autre tâche connexe. Il s'agit d'une méthode de recherche d'apprentissage automatique qui stocke les connaissances acquises lors de la résolution d'un problème particulier et utilise les mêmes connaissances pour résoudre un autre problème différent mais connexe. Cela améliore l'efficacité en réutilisant les informations recueillies à partir de la tâche précédemment apprise.
Il est courant d'utiliser une autre pondération de modèle de réseau pour réduire votre temps de formation, car vous avez besoin de beaucoup de données pour former un modèle de réseau. Pour réduire le temps de formation, vous utilisez d'autres réseaux et son poids et modifiez la dernière couche pour résoudre notre problème. L'avantage est que vous pouvez utiliser un petit ensemble de données pour entraîner la dernière couche.
Ensuite, dans ce didacticiel d'apprentissage PyTorch Transfer, nous apprendrons comment utiliser Transfer Learning avec PyTorch.
Chargement de l'ensemble de données

Source : Alien contre Predator Kaggle
Avant de commencer à utiliser Transfer Learning PyTorch, vous devez comprendre l'ensemble de données que vous allez utiliser. Dans cet exemple de Transfer Learning PyTorch, vous classerez un Alien et un Predator à partir de près de 700 images. Pour cette technique, vous n’avez pas vraiment besoin d’une grande quantité de données pour vous entraîner. Vous pouvez télécharger l'ensemble de données à partir de Kaggle : Alien contre prédateur.
Comment utiliser l’apprentissage par transfert ?
Voici un processus étape par étape sur la façon d'utiliser Transfer Learning pour le Deep Learning avec PyTorch :
Étape 1) Charger les données
La première étape consiste à charger nos données et à transformer les images afin qu'elles correspondent aux exigences du réseau.
Vous chargerez les données d'un dossier avec torchvision.dataset. Le module parcourra le dossier pour diviser les données pour l'entraînement et la validation. Le processus de transformation recadrera les images à partir du centre, effectuera un retournement horizontal, les normalisera et enfin les convertira en tenseur à l'aide du Deep Learning.
from __future__ import print_function, division
import os
import time
import torch
import torchvision
from torchvision import datasets, models, transforms
import torch.optim as optim
import numpy as np
import matplotlib.pyplot as plt
data_dir = "alien_pred"
input_shape = 224
mean = [0.5, 0.5, 0.5]
std = [0.5, 0.5, 0.5]
#data transformation
data_transforms = {
'train': transforms.Compose([
transforms.CenterCrop(input_shape),
transforms.ToTensor(),
transforms.Normalize(mean, std)
]),
'validation': transforms.Compose([
transforms.CenterCrop(input_shape),
transforms.ToTensor(),
transforms.Normalize(mean, std)
]),
}
image_datasets = {
x: datasets.ImageFolder(
os.path.join(data_dir, x),
transform=data_transforms[x]
)
for x in ['train', 'validation']
}
dataloaders = {
x: torch.utils.data.DataLoader(
image_datasets[x], batch_size=32,
shuffle=True, num_workers=4
)
for x in ['train', 'validation']
}
dataset_sizes = {x: len(image_datasets[x]) for x in ['train', 'validation']}
print(dataset_sizes)
class_names = image_datasets['train'].classes
device = torch.device("cuda:0" if torch.cuda.is_available() else "cpu")
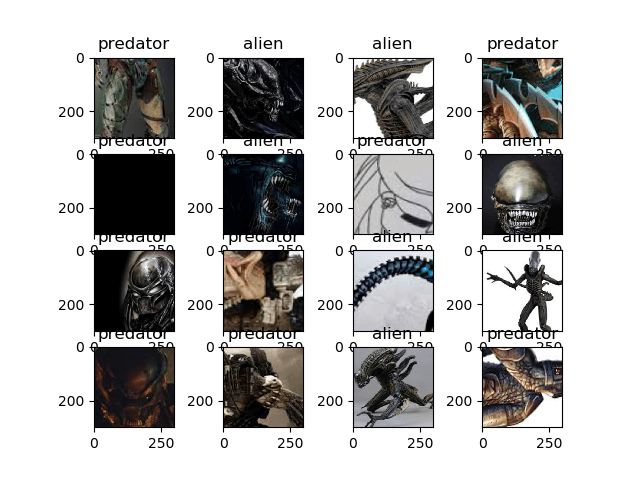
Visualisons notre ensemble de données pour PyTorch Transfer Learning. Le processus de visualisation obtiendra le prochain lot d'images des chargeurs de données et des étiquettes du train et l'affichera avec matplot.
images, labels = next(iter(dataloaders['train'])) rows = 4 columns = 4 fig=plt.figure() for i in range(16): fig.add_subplot(rows, columns, i+1) plt.title(class_names[labels[i]]) img = images[i].numpy().transpose((1, 2, 0)) img = std * img + mean plt.imshow(img) plt.show()
Étape 2) Définir le modèle
Dans ce nouvel article concernant notre nouveau projet L'apprentissage en profondeur processus, vous utiliserez ResNet18 du module torchvision.
Vous utiliserez torchvision.models pour charger resnet18 avec le poids pré-entraîné défini sur True. Après cela, vous gelerez les calques afin qu’ils ne puissent pas être entraînés. Vous modifiez également le dernier calque avec un calque linéaire pour l'adapter à nos besoins, soit 2 classes. Vous utilisez également CrossEntropyLoss pour la fonction de perte multi-classe et pour l'optimiseur, vous utiliserez SGD avec un taux d'apprentissage de 0.0001 et un élan de 0.9, comme indiqué dans l'exemple d'apprentissage par transfert PyTorch ci-dessous.
## Load the model based on VGG19 vgg_based = torchvision.models.vgg19(pretrained=True) ## freeze the layers for param in vgg_based.parameters(): param.requires_grad = False # Modify the last layer number_features = vgg_based.classifier[6].in_features features = list(vgg_based.classifier.children())[:-1] # Remove last layer features.extend([torch.nn.Linear(number_features, len(class_names))]) vgg_based.classifier = torch.nn.Sequential(*features) vgg_based = vgg_based.to(device) print(vgg_based) criterion = torch.nn.CrossEntropyLoss() optimizer_ft = optim.SGD(vgg_based.parameters(), lr=0.001, momentum=0.9)
La structure du modèle de sortie
VGG( (features): Sequential( (0): Conv2d(3, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (1): ReLU(inplace) (2): Conv2d(64, 64, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (3): ReLU(inplace) (4): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (5): Conv2d(64, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (6): ReLU(inplace) (7): Conv2d(128, 128, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (8): ReLU(inplace) (9): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (10): Conv2d(128, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (11): ReLU(inplace) (12): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (13): ReLU(inplace) (14): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (15): ReLU(inplace) (16): Conv2d(256, 256, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (17): ReLU(inplace) (18): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (19): Conv2d(256, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (20): ReLU(inplace) (21): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (22): ReLU(inplace) (23): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (24): ReLU(inplace) (25): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (26): ReLU(inplace) (27): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) (28): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (29): ReLU(inplace) (30): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (31): ReLU(inplace) (32): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (33): ReLU(inplace) (34): Conv2d(512, 512, kernel_size=(3, 3), stride=(1, 1), padding=(1, 1)) (35): ReLU(inplace) (36): MaxPool2d(kernel_size=2, stride=2, padding=0, dilation=1, ceil_mode=False) ) (classifier): Sequential( (0): Linear(in_features=25088, out_features=4096, bias=True) (1): ReLU(inplace) (2): Dropout(p=0.5) (3): Linear(in_features=4096, out_features=4096, bias=True) (4): ReLU(inplace) (5): Dropout(p=0.5) (6): Linear(in_features=4096, out_features=2, bias=True) ) )
Étape 3) Former et tester le modèle
Nous utiliserons certaines des fonctions de Transfer Learning Tutoriel PyTorch pour nous aider à former et à évaluer notre modèle.
def train_model(model, criterion, optimizer, num_epochs=25):
since = time.time()
for epoch in range(num_epochs):
print('Epoch {}/{}'.format(epoch, num_epochs - 1))
print('-' * 10)
#set model to trainable
# model.train()
train_loss = 0
# Iterate over data.
for i, data in enumerate(dataloaders['train']):
inputs , labels = data
inputs = inputs.to(device)
labels = labels.to(device)
optimizer.zero_grad()
with torch.set_grad_enabled(True):
outputs = model(inputs)
loss = criterion(outputs, labels)
loss.backward()
optimizer.step()
train_loss += loss.item() * inputs.size(0)
print('{} Loss: {:.4f}'.format(
'train', train_loss / dataset_sizes['train']))
time_elapsed = time.time() - since
print('Training complete in {:.0f}m {:.0f}s'.format(
time_elapsed // 60, time_elapsed % 60))
return model
def visualize_model(model, num_images=6):
was_training = model.training
model.eval()
images_so_far = 0
fig = plt.figure()
with torch.no_grad():
for i, (inputs, labels) in enumerate(dataloaders['validation']):
inputs = inputs.to(device)
labels = labels.to(device)
outputs = model(inputs)
_, preds = torch.max(outputs, 1)
for j in range(inputs.size()[0]):
images_so_far += 1
ax = plt.subplot(num_images//2, 2, images_so_far)
ax.axis('off')
ax.set_title('predicted: {} truth: {}'.format(class_names[preds[j]], class_names[labels[j]]))
img = inputs.cpu().data[j].numpy().transpose((1, 2, 0))
img = std * img + mean
ax.imshow(img)
if images_so_far == num_images:
model.train(mode=was_training)
return
model.train(mode=was_training)
Enfin, dans cet exemple d'apprentissage par transfert dans PyTorch, commençons notre processus de formation avec le nombre d'époques fixé à 25 et évaluons après le processus de formation. À chaque étape de formation, le modèle prendra en compte les entrées et prédira la sortie. Après cela, la production prévue sera transmise au critère permettant de calculer les pertes. Ensuite, les pertes effectueront un calcul de backprop pour calculer le gradient et enfin calculer les poids et optimiser les paramètres avec autograd.
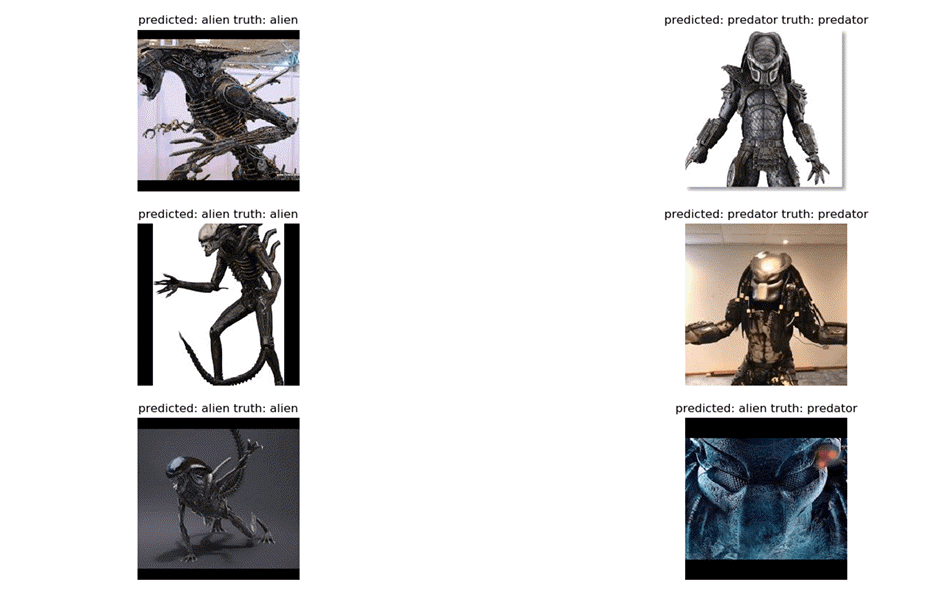
Au niveau du modèle de visualisation, le réseau formé sera testé avec un lot d'images pour prédire les étiquettes. Ensuite, il sera visualisé à l'aide de matplotlib.
vgg_based = train_model(vgg_based, criterion, optimizer_ft, num_epochs=25) visualize_model(vgg_based) plt.show()
Étape 4) Résultats
Le résultat final est que vous avez atteint une précision de 92 %.
Epoch 23/24 ---------- train Loss: 0.0044 train Loss: 0.0078 train Loss: 0.0141 train Loss: 0.0221 train Loss: 0.0306 train Loss: 0.0336 train Loss: 0.0442 train Loss: 0.0482 train Loss: 0.0557 train Loss: 0.0643 train Loss: 0.0763 train Loss: 0.0779 train Loss: 0.0843 train Loss: 0.0910 train Loss: 0.0990 train Loss: 0.1063 train Loss: 0.1133 train Loss: 0.1220 train Loss: 0.1344 train Loss: 0.1382 train Loss: 0.1429 train Loss: 0.1500 Epoch 24/24 ---------- train Loss: 0.0076 train Loss: 0.0115 train Loss: 0.0185 train Loss: 0.0277 train Loss: 0.0345 train Loss: 0.0420 train Loss: 0.0450 train Loss: 0.0490 train Loss: 0.0644 train Loss: 0.0755 train Loss: 0.0813 train Loss: 0.0868 train Loss: 0.0916 train Loss: 0.0980 train Loss: 0.1008 train Loss: 0.1101 train Loss: 0.1176 train Loss: 0.1282 train Loss: 0.1323 train Loss: 0.1397 train Loss: 0.1436 train Loss: 0.1467 Training complete in 2m 47s
Terminez ensuite la sortie de notre modèle sera visualisée avec matplot ci-dessous :
Résumé
Alors, résumons tout ! Le premier facteur est que PyTorch est un framework d'apprentissage profond en pleine croissance pour les débutants ou à des fins de recherche. Il offre un temps de calcul élevé, un graphique dynamique, un support GPU et il est entièrement écrit en Python. Vous êtes capable de définir facilement votre propre module réseau et d’effectuer le processus de formation avec une itération simple. Il est clair que PyTorch est idéal pour les débutants qui souhaitent découvrir l'apprentissage en profondeur et pour les chercheurs professionnels, il est très utile avec un temps de calcul plus rapide et également la fonction autograd très utile pour assister les graphiques dynamiques.